Перекос сигнала соотношение нулей и единиц ацп. Преобразование аналоговой информации в цифровую форму
6. Аналого-цифровое преобразование сигналов.
Для преобразования любого аналогового сигнала (звука, изображения) в цифровую форму необходимо выполнить три основные операции: дискретизацию, квантование и кодирование.
Дискретизация -
представление непрерывного аналогового сигнала последовательностью его значений (отсчетов). Эти отсчеты берутся в моменты времени, отделенные друг от друга интервалом, который называется интервалом дискретизации. Величину, обратную интервалу между отсчетами, называют частотой дискретизации. На рис. 1 показаны исходный аналоговый сигнал и его дискретизированная версия. Картинки, приведенные под временными диаграммами, получены в предположении, что сигналы являются телевизионными видеосигналами одной строки, одинаковыми для всего телевизионного растра.
Рис.1 Аналого-цифровое
преобразование. Дискретизация.
Понятно, что чем меньше интервал дискретизации и, соответственно, выше частота дискретизации, тем меньше различия между исходным сигналом и его дискретизированной копией. Ступенчатая структура дискретизированного сигнала может быть сглажена с помощью фильтра нижних частот. Таким образом и осуществляется восстановление аналогового сигнала из дискретизированного. Но восстановление будет точным только в том случае, если частота дискретизации по крайней мере в 2 раза превышает ширину полосы частот исходного аналогового сигнала (это условие определяется известной теоремой Котельникова). Если это условие не выполняется, то дискретизация сопровождается необратимыми искажениями. Дело в том, что в результате дискретизации в частотном спектре сигнала появляютсся дополнительные компоненты, располагающиеся вокруг гармоник частоты дискретизации в диапазоне, равном удвоенной ширине спектра исходного аналогового сигнала. Если максимальная частота в частотном спектре аналогового сигнала превышает половину частоты дискретизации, то дополнительные компоненты попадают в полосу частот исходного аналогового сигнала. В этом случае уже нельзя восстановить исходный сигнал без искажений. Теория дискретизации приведена во многих книгах.

Рис.2 Аналого-цифровое
преобразование. Искажение
дискретизации.
Пример искажений дискретизации приведен на рис. 2. Аналоговый сигнал (предположим опять, что это видеосигнал ТВ строки) содержит волну, частота которой сначала увеличивается от 0,5 МГц до 2,5 МГц, а затем уменьшается до 0,5 МГц. Этот сигнал дискретизируется с частотой 3 МГц. На рис. 2 последовательно приведены изображения: исходный аналоговый сигнал, дискретизированный сигнал, восстановленный после дискретизации аналоговый сигнал. Восстанавливающий фильтр нижних частот имеет полосу пропускания 1,2 МГц. Как видно, низкочастотные компоненты (меньше 1 МГц) восстанавливаются без искажений. Волна с частотой 1,5 МГц исчезает и превращается в относительно ровное поле. Волна с частотой 2,5 МГц после восстановления превратилась в волну с частотой 0,5 МГц (это разность между частотой дискретизации 3 МГц и частотой исходного сигнала 2,5 МГц). Эти диаграммы-картинки иллюстрируют искажения, связанные с недостаточно высокой частотой пространственной дискретизации изображения. Если объект телевизионной съемки представляет собой очень быстро движущийся или, например, вращающийся предмет, то могут возникать и искажения дискретизации во временной области. Примером искажений, связанных с недостаточно высокой частотой временной дискретизации (а это частота кадров телевизионного разложения), является картина быстро движущегося автомобиля с неподвижными или, например, медленно вращающимися в ту или иную сторону спицами колеса (стробоскопический эффект).Если частота дискретизации установлена, то искажения дискретизации отсутствуют, когда полоса частот исходного сигнала ограничена сверху и не превышает половины частоты дискретизации.
Если потребовать, чтобы в процессе дискретизации не возникало искажений ТВ сигнала с граничной частотой, например, 6 МГц, то частота дискретизации должна быть не меньше 12 Мгц. Однако, чем ближе частота дискретизации к удвоенной граничной частоте сигнала, тем труднее создать фильтр нижних частот, который используется при восстановлении, а также при предварительной фильтрации исходного аналогового сигнала. Это объясняется тем, что при приближении частоты дискретизации к удвоенной граничной частоте дискретизируемого сигнала предъявляются все более жесткие требования к форме частотных характеристик восстанавливающих фильтров - она все точнее должна соответствовать прямоугольной характеристике. Следует подчеркнуть, что фильтр с прямоугольной характеристикой не может быть реализован физически. Такой фильтр, как показывает теория, должен вносить бесконечно большую задержку в пропускаемый сигнал. Поэтому на практике всегда существует некоторый интервал между удвоенной граничной частотой исходного сигнала и частотой дискретизации.
Квантование
представляет собой замену величины отсчета сигнала ближайшим значением из набора фиксированных величин - уровней квантования. Другими словами, квантование - это округление величины отсчета. Уровни квантования делят весь диапазон возможного изменения значений сигнала на конечное число интервалов - шагов квантования. Расположение уровней квантования обусловлено шкалой квантования. Используются как равномерные, так и неравномерные шкалы. На рис. 3 показаны исходный аналоговый сигнал и его квантованная версия, полученная с использованием равномерной шкалы квантования, а также соответствующие сигналам изображения.– электронная схема, принимающая на свои входы два аналоговых сигнала и выдающая логический «0» или «1», в зависимости от того, какой из сигналов больше.
Два входа для подачи аналоговых сигналов носят названия неинвертирующий
(+) и инвертирующий
(-). Если на неинвертирующем входе напряжение больше, чем на инвертирующем, выходной сигнал равен логической «1», иначе – логическому «0».
Будучи включенным, компаратор позволяет сравнивать значения напряжений, присутствующих на соответствующих входах микроконтроллера.
Результатом сравнения является логическое значение, которое может быть прочитано внутри программы. По результату сравнения может быть сгенерировано прерывание, а также осуществлен захват состояния таймера-счетчика.
Чтобы выводы микроконтроллера, обладающие соответствующей альтернативной функцией, можно было использовать аналоговым компаратором, они должны быть сконфигурированы как аналоговые входы.
Аналого-цифровой преобразователь
Аналого-цифровой преобразователь
(АЦП) – это устройство, преобразующее входной аналоговый сигнал в дискретный код (цифровой сигнал), чаще всего – двоичный. Обратное преобразование осуществляется при помощи цифро-аналогового преобразователя
(ЦАП).
В качестве аналогового сигнала может выступать любая физическая непрерывно меняющаяся величина либо ее эквивалент. Чаще всего в качестве входного сигнала используется эквивалентный сигнал напряжения для получения цифровой информации о температуре, токе, влажности и т.д.
Большинство аналого-цифровых преобразователей являются линейными, то есть диапазон входных значений, отображаемый на выходное цифровое значение, связан по линейному закону с этим выходным значением. Основой построения АЦП является аналоговый компаратор.
Разрешение АЦП
– минимальное изменение величины аналогового сигнала, которое может быть преобразовано данным АЦП. Обычно измеряется в вольтах.
Разрядность АЦП
характеризует количество дискретных значений, которые преобразователь может выдать на выходе. Измеряется в битах. Например, АЦП, способный выдать 2 8 =256
дискретных значений (0..255), имеет разрядность 8 бит.
равно разности напряжений, соответствующих максимальному и минимальному выходному коду, делённой на количество выходных дискретных значений.
где N
– разрядность АЦП.
При этом напряжение на входе преобразователя можно оценить, зная полученное цифровое значение аналого-цифрового преобразования Value

На практике разрешение АЦП ограничено отношением сигнал-шум входного сигнала. При большой интенсивности шумов на входе АЦП различение соседних уровней входного сигнала становится невозможным, то есть ухудшается разрешение. При этом реально достижимое разрешение описывается эффективной разрядностью
(effective number of bits - ENOB), которая меньше, чем реальная разрядность АЦП. При преобразовании сильно зашумленного сигнала младшие биты выходного кода практически бесполезны, так как содержат шум.
Дискретизацией сигнала
называется измерительное преобразование непрерывного сигнала x(t)
в последовательность мгновенных значений этого сигнала X(k i T)
, соответствующих определенным моментам времени k i T
(T
– шаг дискретизации).
Дискретизацию сигнала по времени можно проводить с постоянным шагом T
= const или с переменным шагом T
= var.
Частота дискретизации
– частота, с которой производится аналого-цифровое преобразование сигнала.
Время преобразования
– время от начала преобразования до появления на выходе АЦП соответствующего кода.
Опорное напряжение
– напряжение, соответствующее максимальному выходному коду.
Поскольку реальные АЦП не могут произвести аналого-цифровое преобразование мгновенно, входное аналоговое значение должно удерживаться постоянным, по крайней мере, от начала до конца процесса преобразования (этот интервал времени называют время преобразования ). Эта задача может решаться путем использования специальной схемы на входе АЦП – устройства выборки-хранения (УВХ). УВХ, как правило, хранит входное напряжение в конденсаторе, который соединен с входом через аналоговый ключ: при замыкании ключа происходит выборка входного сигнала (конденсатор заряжается до входного напряжения), при размыкании – хранение. Как правило, модули АЦП содержат встроенное УВХ.
Аналогово-цифровой преобразователь (АЦП) - один из самых важных электронных компонентов в измерительном и тестовом оборудовании. АЦП преобразует напряжение (аналоговый сигнал) в код, над которым микропроцессор и программное обеспечение выполняют определенные действия. Даже если Вы работаете только с цифровыми сигналами, скорее всего Вы используете АЦП в составе осциллографа, чтобы узнать их аналоговые характеристики.
Существует несколько основных типов архитектуры АЦП, хотя в пределах каждого типа существует также множество вариаций. Различные типы измерительного оборудования используют различные типы АЦП. Например, в цифровом осциллографе используется высокая частота дискретизации, но не требуется высокое разрешение. В цифровых мультиметрах нужно большее разрешение, но можно пожертвовать скоростью измерения. Системы сбора данных общего назначения по скорости дискретизации и разрешающей способности обычно занимают место между осциллографами и цифровыми мультиметрами. В оборудовании такого типа используются АЦП последовательного приближения либо сигма-дельта АЦП. Существуют также параллельные АЦП для приложений, требующих скоростной обработки аналоговых сигналов, и интегрирующие АЦП с высокими разрешением и помехоподавлением.
АЦП двухтактного интегрирования имеют высокую точность и высокую разрешающую способность, а также имеют сравнительно простую структуру. Это дает возможность выполнять их в виде интегральных микросхем. Основной недостаток таких АЦП - большое время преобразования, обусловленное привязкой периода интегрирования к длительности периода питающей сети. Например, для 50 Гц - оборудования частота дискретизации АЦП двухтактного интегрирования не превышает 25 отсчетов/сек. Конечно, такие АЦП могут работать и с большей частотой дискретизации, но при увеличении последней помехозащищенность падает.

Спецификация АЦП
Существуют общие определения, которые принято использовать в отношении аналого-цифровых преобразователей. Тем не менее, характеристики, приводимые в технической документации производителей АЦП, могут показаться довольно путаными. Правильный же выбор оптимального по сочетанию своих характеристик АЦП для конкретного приложения требует точной интерпретации данных, приводимых в технической документации.
Наиболее часто путаемыми параметрами являются разрешающая способность и точность, хотя эти две характеристики реального АЦП крайне слабо связаны между собой. Разрешение не идентично точности, 12-разрядный АЦП может иметь меньшую точность, чем 8-разрядный. Для АЦП разрешение представляет собой меру того, на какое количество сегментов может быть поделен входной диапазон измеряемого аналогового сигнала (например, для 8-разрядного АЦП это 2 8 =256 сегментов). Точность же характеризует суммарное отклонение результата преобразования от своего идеального значения для данного входного напряжения. То есть, разрешающая способность характеризует потенциальные возможности АЦП, а совокупность точностных параметров определяет реализуемость такой потенциальной возможности.
АЦП преобразует входной аналоговый сигнал в выходной цифровой код. Для реальных преобразователей, изготавливаемых в виде интегральных микросхем, процесс преобразования не является идеальным: на него оказывают влияние как технологический разброс параметров при производстве, так и различные внешние помехи. Поэтому цифровой код на выходе АЦП определяется с погрешностью. В спецификации на АЦП указываются погрешности, которые дает сам преобразователь. Их обычно делят на статические и динамические. При этом именно конечное приложение определяет, какие характеристики АЦП будут считаться определяющими, самыми важными в каждом конкретном случае.
Статическая погрешность
В большинстве применений АЦП используют для измерения медленно изменяющегося, низкочастотного сигнала (например, от датчика температуры, давления, от тензодатчика и т.п.), когда входное напряжение пропорционально относительно постоянной физической величине. Здесь основную роль играет статическая погрешность измерения. В спецификации АЦП этот тип погрешности определяют аддитивная погрешность (Offset), мультипликативная погрешность (Full-Scale), дифференциальная нелинейность (DNL), интегральная нелинейность (INL) и погрешность квантования. Эти пять характеристик позволяют полностью описать статическую погрешность АЦП.
Идеальная передаточная характеристика АЦП
Передаточная характеристика АЦП - это функция зависимости кода на выходе АЦП от напряжения на его входе. Такой график представляет собой кусочно-линейную функцию из 2 N "ступеней", где N - разрядность АЦП. Каждый горизонтальный отрезок этой функции соответствует одному из значений выходного кода АЦП (см. рис. 7). Если соединить линиями начала этих горизонтальных отрезков (на границах перехода от одного значения кода к другому), то идеальная передаточная характеристика будет представлять собой прямую линию, проходящую через начало координат.


Дифференциальная нелинейность
У идеальной передаточной характеристики АЦП ширина каждой "ступеньки" должна быть одинакова. Разница в длине горизонтальных отрезков этой кусочно-линейной функции из 2 N "ступеней" представляет собой дифференциальную нелинейность (DNL).
Величина наименьшего значащего разряда у АЦП составляет V ref /2 N , где V ref - опорное напряжение, N - разрешение АЦП. Разность напряжений между каждым кодовым переходом должна быть равна величине LSB. Отклонение этой разности от LSB определяются как дифференциальная нелинейность. На рисунке это показано как неравные промежутки между "шагами" кода или как "размытость" границ переходов на передаточной характеристике АЦП.

Интегральная нелинейность
Интегральная нелинейность (INL) - это погрешность, которая вызывается отклонением линейной функции передаточной характеристики АЦП от прямой линии, как показано на рис. 12 . Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения. Интегральную нелинейность определяют путем сравнения напряжений, при которых происходят кодовые переходы. Для идеального АЦП эти переходы будут происходить при значениях входного напряжения, точно кратных LSB. А для реального преобразователя такое условие может выполняться с погрешностью. Разность между "идеальными" уровнями напряжения, при которых происходит кодовый переход, и их реальными значениями выражается в единицах LSB и называется интегральной нелинейностью.

Погрешность квантования
Одна из наиболее существенных составляющих ошибки при измерениях с помощью АЦП - погрешность квантования -является результатом самого процесса преобразования. Погрешность квантования - это погрешность, вызванная значением шага квантования и определяемая как ½ величины наименьшего значащего разряда (LSB). Она не может быть исключена в аналого-цифровых преобразованиях, так как является неотъемлемой частью процесса преобразования, определяется разрешающей способностью АЦП и не меняется от АЦП к АЦП с равным разрешением.
Динамические характеристики
Динамические характеристики АЦП обычно определяют с помощью спектрального анализа, по результатам выполнения быстрого преобразования Фурье (БПФ) над массивом выходных значений АЦП, соответствующих некоторому тестовому входному сигналу.
Эти искажения определяют как общие гармонические искажения (THD). Они определяются как:

Величина гармонических искажений уменьшается на высоких частотах до точки, в которой амплитуда гармоник становится меньше, чем уровень шума. Таким образом, если мы анализируем вклад гармонических искажений в результаты преобразования, это можно делать либо во всем спектре частот, ограничивая при этом амплитуду гармоник уровнем шума, либо ограничивая полосу частот для анализа. Например, если в нашей системе стоит ФНЧ, то высокие частоты нам просто неинтересны и высокочастотные гармоники не подлежат учету.
Отношение "сигнал/шум и искажения"
Отношение "сигнал/шум и искажения" (SiNAD) более полно описывает шумовые характеристики АЦП. SiNAD учитывает величину как шума, так и гармонических искажений по отношению к полезному сигналу. SiNAD рассчитывается по следующей формуле:

Динамический диапазон, свободный от гармоник

Спецификация АЦП, приводимая в технической документации на микросхемы, помогает обоснованно выбрать преобразователь для конкретного применения. В качестве примера рассмотрим спецификацию АЦП, интегрированного в новый микроконтроллер C8051F064 производства фирмы Silicon Laboratories.
Микроконтроллер C8051F064
Кристалл C8051F064 представляет собой скоростной 8-разрядный микроконтроллер для совместной обработки аналоговых и цифровых сигналов с двумя интегрированными 16-разрядными АЦП последовательных приближений. Встроенные АЦП могут работать в однопроводном и дифференциальном режимах при максимальной производительности до 1М отсчетов/сек. На рис. 17 приведены основные характеристики АЦП микроконтроллера C8051F064. Для самостоятельной оценки возможностей C8051F064 по цифровой и аналоговой обработке данных можно воспользоваться недорогим оценочным комплектом C8051F064EK (рис. 18). Комплект содержит оценочную плату на базе C8051F064, USB-кабель, документацию, а также программное обеспечение для тестирования аналоговых динамических и статических характеристик интегрированного высокоточного 16-разрядного АЦП.
| Параметры | Условия | Мин. | Типичное | Макс. | Единицы измерения |
| Характеристики на постоянном токе | |||||
| Разрядность | 16 | бит | |||
| Интегральная нелинейность | Однопроводный | ±0.75 | ±2 | LSB | |
| Однопроводный | ±0.5 | ±1 | LSB | ||
| Дифференциальная нелинейность | Гарантированная монотонность | ±+0.5 | LSB | ||
| Аддитивная погрешность (смещение) | 0.1 | мВ | |||
| Мультипликативная погрешность | 0.008 | % F.S. | |||
| Температурный коэффициент усиления | 0.5 | ppm/°C | |||
| Динамические характеристики (Частота дискретизации 1 Msps, AVDD, AV+ = 3.3 В) | |||||
| Сигнал/шум и искажения | 86 | дБ | |||
| 84 | дБ | ||||
| 89 | дБ | ||||
| 88 | дБ | ||||
| Общие гармонические искажения | Fin = 10 кГц, однопроводный | 96 | дБ | ||
| Fin = 100 кГц, однопроводный | 84 | дБ | |||
| Fin = 10 кГц, дифференциальный | 103 | дБ | |||
| Fin = 100 кГц, дифференциальный | 93 | дБ | |||
| Динамический диапазон, свободный от гармоник | Fin = 10 кГц, однопроводный | 97 | дБ | ||
| Fin = 100 кГц, однопроводный | 88 | дБ | |||
| Fin = 10 кГц, дифференциальный | 104 | дБ | |||
| Fin = 100 кГц, дифференциальный | 99 | дБ | |||

Cписок литературы.
Аналого-цифровые преобразователи (АЦП) - это устройства, предназначенные для преобразования аналоговых сигналов в цифровые. Для такого преобразования необходимо осуществить квантование аналогового сигнала, т. е. мгновенные значения аналогового сигнала ограничить определенными уровнями, называемыми уровнями квантования.
Характеристика идеального квантования имеет вид, приведенный на рис. 3.92.
Квантование представляет собой округление аналоговой величины до ближайшего уровня квантования, т. е. максимальная погрешность квантования равна ±0,5h (h - шаг квантования).
К основным характеристикам АЦП относят число разрядов, время преобразования, нелинейность и др. Число разрядов - количество разрядов кода, связанного с аналоговой величиной, которое может вырабатывать АЦП. Часто говорят о разрешающей способности АЦП, которую определяют величиной, обратной максимальному числу кодовых комбинаций на выходе АЦП. Так, 10-разрядный АЦП имеет разрешающую способность (2 10 = 1024) −1 , т. е. при шкале АЦП, соответствующей 10В, абсолютное значение шага квантования не превышает 10мВ. Время преобразования t пp - интервал времени от момента заданного изменения сигнала на входе АЦП до появления на его выходе соответствующего устойчивого кода.
Характерными методами преобразования являются следующие: параллельного преобразования аналоговой величины и последовательного преобразования.
АЦП с параллельным преобразованием входного аналогового сигнала
По параллельному методу входное напряжение одновременно сравниваются с n опорными напряжениями и определяют, между какими двумя опорными напряжениями оно лежит. При этом результат получают быстро, но схема оказывается достаточно сложной.
Принцип действия АЦП (рис. 3.93)

При U вх = 0, поскольку для всех ОУ разность напряжений (U + − U −) < 0 (U + , U − - напряжения относительно общей точки соответственно неинвертирующего и инвертирующего входа), напряжения на выходе всех ОУ равны −Е пит а на выходах кодирующего преобразователя (КП) Z 0 , Z 1 , Z 2 устанавливаются нули. Если U вх > 0,5U, но меньше 3/2U, лишь для нижнего ОУ (U + − U −) > 0 и лишь на его выходе появляется напряжение +Е пит, что приводит к появлению на выходах КП следующих сигналов: Z 0 = 1, Z 2 = Z l = 0. Если U вх > 3/2U, но меньше 5/2U, то на выходе двух нижних ОУ появляется напряжение +Е пит, что приводит к появлению на выходах КП кода 010 и т. д.
Посмотрите интересное видео о работе АЦП:
АЦП с последовательным преобразованием входного сигнала
Это АЦП последовательного счета, который называют АЦП со следящей связью (рис. 3.94). 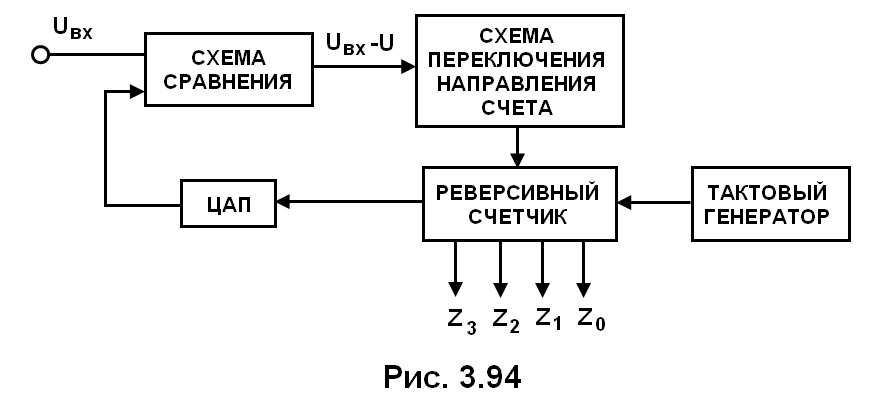 В АЦП рассматриваемого типа используется ЦАП и реверсивный счетчик, сигнал с которого обеспечивает изменение напряжения на выходе ЦАП. Настройка схемы такова, что обеспечивается примерное равенство напряжений на входе U вх и на выходе ЦАП −U. Если входное напряжение U вх больше напряжения U на выходе ЦАП, то счетчик переводится в режим прямого счета и код на его выходе увеличивается, обеспечивая увеличение напряжения на выходе ЦАП. В момент равенства U вх и U счет прекращается и с выхода реверсивного счетчика снимается код, соответствующий входному напряжению.
В АЦП рассматриваемого типа используется ЦАП и реверсивный счетчик, сигнал с которого обеспечивает изменение напряжения на выходе ЦАП. Настройка схемы такова, что обеспечивается примерное равенство напряжений на входе U вх и на выходе ЦАП −U. Если входное напряжение U вх больше напряжения U на выходе ЦАП, то счетчик переводится в режим прямого счета и код на его выходе увеличивается, обеспечивая увеличение напряжения на выходе ЦАП. В момент равенства U вх и U счет прекращается и с выхода реверсивного счетчика снимается код, соответствующий входному напряжению.
Метод последовательного преобразования реализуется и в АЦП время - импульсного преобразования (АЦП с генератором линейно изменяющегося напряжения (ГЛИН)).
Принцип действия рассматриваемого АЦП рис. 3.95) основан на подсчете числа импульсов в отрезке времени, в течение которого линейно изменяющееся напряжение (ЛИН), увеличиваясь от нулевого значения, достигает уровня входного напряжения U вх. Использованы следующие обозначения: СС - схема сравнения, ГИ - генератор импульсов, Кл - электронный ключ, Сч - счетчик импульсов. 
Отмеченный во временной диаграмме момент времени t 1 соответствует началу измерения входного напряжения, а момент времени t 2 соответствует равенству входного напряжения и напряжения ГЛИН. Погрешность измерения определяется шагом квантования времени. Ключ Кл подключает к счетчику генератор импульсов от момента начала измерения до момента равенства U вх и U глин. Через U Сч обозначено напряжение на входе счетчика.
Код на выходе счетчика пропорционален входному напряжению. Одним из недостатков этой схемы является невысокое быстродействие.

АЦП с двойным интегрированием
Такой АЦП реализует метод последовательного преобразования входного сигнала (рис. 3.96). Использованы следующие обозначения: СУ - система управления, ГИ - генератор импульсов, Сч - счетчик импульсов. Принцип действия АЦП состоит в определении отношения двух отрезков времени, в течение одного из которых выполняется интегрирование входного напряжения U вх интегратором на основе ОУ (напряжение U и на выходе интегратора изменяется от нуля до максимальной по модулю величины), а в течение следующего - интегрирование опорного напряжения U оп (U и меняется от максимальной по модулю величины до нуля) (рис. 3.97). 
Пусть время t 1 интегрирования входного сигнала постоянно, тогда чем больше второй отрезок времени t 2 (отрезок времени, в течение которого интегрируется опорное напряжение), тем больше входное напряжение. Ключ К З предназначен для установки интегратора в исходное нулевое состояние. В первый из указанных отрезков времени ключ К 1 замкнут, ключ К 2 разомкнут, а во второй, отрезок времени их состояние является обратным по отношению к указанному. Одновременно с замыканием ключа К 2 импульсы с генератора импульсов ГИ начинают поступать через схему управления СУ на счетчик Сч.
Поступление этих импульсов заканчивается тогда, когда напряжение на выходе интегратора оказывается равным нулю.
Напряжение на выходе интегратора по истечении отрезка времени t 1 определяется выражением
U и (t 1) = − (1/RC) · t1 ∫ 0 U вх dt= − (U вх · t 1) / (R·C)
Используя аналогичное выражение для отрезка времени t 2 , получим
t 2 = − (R·C/U оп) ·U и (t 1)
Подставив сюда выражение для U и (t 1), получим t 2 =(U вх / U оп)·t 1 откуда U вх = U oa · t 2 /t 1
Код на выходе счетчика определяет величину входного напряжения.
Одним из основных преимуществ АЦП рассматриваемого типа является высокая помехозащищенность. Случайные выбросы входного напряжения, имеющие место в течение короткого времени, практически не оказывают влияния на погрешность преобразования. Недостаток АЦП - малое быстродействие.
Наиболее распространенными являются АЦП серий микросхем 572, 1107, 1138 и др. (табл. 3.3)  Из таблицы видно, что наилучшим быстродействием обладает АЦП параллельного преобразования, а наихудшим - АЦП последовательного преобразования.
Из таблицы видно, что наилучшим быстродействием обладает АЦП параллельного преобразования, а наихудшим - АЦП последовательного преобразования.
Предлагаем посмотреть ещё одно достойное видео о работе и устройстве АЦП:
АПЦ - это А налого-Ц ифровой П реобразователь. По английски ADC (A nalog-to-D igital C onverter). То есть специальное устройство, которое преобразует в цифровой.
АЦП применяется в цифровой технике. В частности, почти все современные имеют встроенный АЦП.
Как вы уже наверняка знаете, микропроцессоры (как и компьютерные процессоры) не понимают ничего, кроме двоичных чисел. Из этого следует, что микропроцессор (который является основой любого микроконтроллера) не может напрямую обработать аналоговый сигнал.
АЦП микроконтроллера обычно измеряет только напряжение в диапазоне от 0 до напряжения питания микроконтроллера.
Характеристики АЦП
АЦП бывают разные, с разными характеристиками. Основная характеристика - это разрядность. Однако есть и другие. Например, вид аналогового сигнала, который можно подключать к входу АЦП.
Все эти характеристики описаны в документации на АЦП (если он выполнен в виде отдельной микросхемы) или в документации на микроконтроллер (если АЦП встроен в микроконтроллер).
Кроме разрядности, о которой мы уже говорили, можно назвать ещё несколько основных характеристик.
Least significant bit (LSB) - младший значащий разряд (МЗР) . Это наименьшее входное напряжение, которое может быть измерено АЦП. Определяется по формуле:
1 LSB = Uоп / 2 Р
Где Uоп - это опорное напряжение (указывается в характеристиках АЦП). Например, при опорном напряжении 1 В и разрядности 8 бит, получим:
1 LSB = 1 / 2 8 = 1 / 256 = 0,004 В
Integral Non-linearity - интегральная нелинейность выходного кода АЦП . Понятно, что любое преобразование вносит искажения. И эта характеристика определяет нелинейность выходного значения, то есть отклонение выходного значения АЦП от идеального линейного значения. Измеряется эта характеристика в LSB.
Иными словами, эта характеристика определяет, насколько “кривой” может быть линия на графике выходного сигнала, которая в идеале должна быть прямой (см. рис.).

Абсолютная точность . Также измеряется в LSB. Иными словами, это погрешность измерения. Например, если эта характеристика равна +/- 2 LSB, а LSB = 0,05 В, то это означает, что погрешность измерений может достигать +/- 2*0,05 = +/- 0,1В.
Есть у АЦП и другие характеристики. Но для начала и этого более чем достаточно.
Подключение АЦП
Напомню, что , в основном, бывают двух видов: токовые и напряжения. Кроме того, сигналы могут иметь стандартный диапазон значений, и нестандартный. Стандартные диапазоны значений аналоговых сигналов описаны в ГОСТах (например, ГОСТ 26.011-80 и ГОСТ Р 51841-2001). Но, если в вашем устройстве используется какой-то самодельный датчик, то сигнал может и отличаться от стандартного (хотя я советую в любых случаях выбирать какой-нибудь стандартный сигнал - для совместимости со стандартными датчиками и другими устройствами).
АЦП в основном измеряют напряжение.
Попробую рассказать о том (в общих чертах), как подключить аналоговый датчик к АЦП и как потом разобраться с теми значениями, которые будет выдавать АЦП.
Итак, допустим, что мы хотим измерять температуру в диапазоне -40…+50 градусов с помощью специального датчика со стандартным выходом 0...1В. Допустим, что у нас есть датчик, который может измерять температуру в диапазоне -50…+150 градусов.
Если температурный датчик имеет стандартный выход, то, как правило, напряжение (или ток) на выходе датчика изменяется по линейному закону. То есть мы можем легко определить, какое напряжение будет на выходе датчика при заданной температуре.
Что такое линейный закон? Это когда диапазон значений на графике выглядит как прямая линия (см. рис.). Зная, что температура от -50 до +150 даёт на выходе датчика напряжение, изменяемое по линейному закону, мы, как я уже сказал, можем вычислить это напряжение для любого значения температуры на заданном диапазоне.

В общем, чтобы в нашем случае диапазон температур преобразовать в диапазон напряжений, нам надо каким-то образом сопоставить две шкалы, одна из которых является диапазоном температур, а другая - диапазоном напряжений.
Определить напряжение по температуре визуально можно по графику (см. рис. выше). Но микроконтроллер глаз не имеет (хотя, конечно, можно поразвлекаться и создать устройство на микроконтроллере, способное распознавать образы и определять значение температуры по напряжению на графике, но оставим эти развлечения фанатам робототехники)))
Первым делом определяем диапазон температур. Он у нас от -50 до 150, то есть 201 градус (не забываем про ноль).
А диапазон измеряемых напряжений - от 0 до 1 В.
То есть в шкалу от 0 до 1 нам надо впихнуть диапазон от 0 до 200 (всего 201).
Находим коэффициент преобразования:
К = U / Tд = 1 / 200 = 0,005 (1)
То есть при изменении температуры на 1 градус напряжение на выходе датчика будет меняться на 0,005 В. Здесь Тд - это температурный диапазон. Не значения температуры, а количество единиц измерения (в нашем случае градусов) на температурной шкале, сопоставляемой со шкалой напряжения (ноль не учитываем для упрощения, так как в диапазоне напряжений тоже есть ноль).
Проверяем характеристики АЦП микроконтроллера, который мы планируем использовать. Значение LSB не должно быть более К (более 0,005 в нашем случае, точнее, это допустимо, если вас устроит погрешность более 1 единицы измерения - более 1 градуса в нашем случае).
По сути К - это вольт на градус, то есть так мы узнали, на какое значение изменяется напряжение при изменении температуры на 1 градус.
Теперь у нас есть все необходимые данные, чтобы в программе микроконтроллера преобразовать значение на выходе АЦП в значение температуры.
Мы помним, что мы сместили диапазон температур на 50 градусов. Это надо учитывать при преобразовании значения на выходе АЦП в температуру.
А формула будет такая:
Т = (U / К) - 50 (2)
Например, если на выходе АЦП 0,5 В, то
Т = (U / К) - 50 = (0,5 / 0,005) - 50 = 100 - 50 = 50 градусов
Теперь нам надо определить дискретность, то есть желаемую точность измерений.
Как вы помните, абсолютная погрешность может составлять несколько LSB. К тому же ещё существуют нелинейные искажения, которые обычно равны 0,5 LSB. То есть общая погрешность АЦП может доходить до 2-3 LSB.
В нашем случае это:
Uп = 3 LSB * 0,005 = 0,015 В
Или 3 градуса.
Если в вашем случае не так всё гладко, то снова используем формулу, выведенную из (1):
Тд = Uп / K = 0,015 / 0,005 = 3
Если погрешность в 3 градуса вас устраивает, то можно ничего не менять. Ну а если нет, то придётся подобрать АЦП с большей разрядностью либо подыскать другой датчик (с другим температурным диапазоном или с другим выходным напряжением).
Например, если вам удастся найти датчик с диапазоном -40…+50, как мы и хотели, и с таким же выходом 0...1В, то
К = 1 / 90 = 0,01
Тогда абсолютная погрешность будет:
Тд = Uп / K = 0,015 / 0,01 = 1,5 градуса.
Это уже более-менее приемлемо. Ну а если у вас будет датчик с выходом 0...5В (это тоже стандартный сигнал), то
К = 5 / 90 = 0,05
А абсолютная погрешность будет:
Тд = Uп / K = 0,015 / 0,05 = 0,3 градуса.
Это уже вообще ништяк.
Но! Не забывайте, что здесь мы рассматриваем только погрешность АЦП. Но и у самого датчика тоже есть погрешность, которую также надо учитывать.
Но всё это уже из области электроники и метрологии, поэтому данную статью я здесь и закончу.
А в конце на всякий случай приведу формулу обратного преобразования температуры в напряжение:
U = K * (Tв + 50) = 0,005 * (150 + 50) = 1
P.S. Писал эту статью после тяжёлого рабочего дня, так что если что где напутал - прошу прощения)))


















